Alimentations et tensions
Sommaire
- Introduction
- Une première alimentation ?
- Les régulateurs linéaires
- Les régulateurs à découpage
Introduction
Lors de la mise en place d’un projet simple, il est aisé d’utiliser la source d’énergie directement appropriée
Exemple : Pour un appareil fonctionnant en 4,5 v, on met 3 piles de 1,5V et le tour est joué .
Malheureusement, en Electronique/Robotique , les choses ont tendance à très vite se compliquer
Malheureusement, en Electronique/Robotique , les choses ont tendance à très vite se compliquer
Pour un robot autonome , il est tentant d’utiliser une batterie 12V (bas coût et réserve d’énergie intéressante)
Ceci étant, que va alimenter notre belle batterie 12V ?
- Un carte Arduino fonctionnant sous 5V ?
- Un pcduino 3,3V ?
- Des servomoteurs 6V ?
- Des moteurs divers et variés fonctionnant selon la taille en 3, 6, 9, 12 V ?
Et encore il ne s’agit là que d’éléments utilisés couramment …..
Une première alimentation ?
Il faut donc trouver le moyen d’adapter nos 12V de base aux différentes utilisations qui en seront faites.
Différentes solutions peuvent être adoptées, selon le résultat à obtenir.
Il faut tout d’abord se méfier des solutions simplistes.
Vous trouverez sur le net, beaucoup de forums ,où l’on vous préconise de réaliser un pont diviseur :
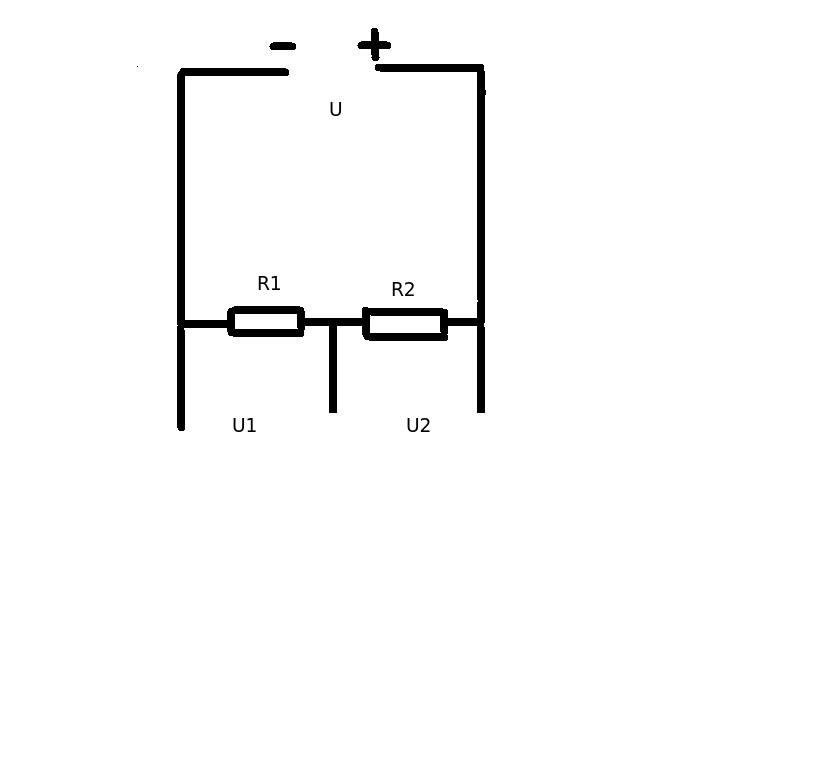
Dans ce type de montage U = U1 + U2
et si les résistances sont égales , U1 =U2 = U/2
Ainsi avec une source 12V, on obtient du 6V…
….sauf que si la théorie est tentante, la réalité l’est beaucoup moins. En effet ,il ne faut pas oublier que les 6V sont faits pour servir à quelque chose, ici pour
alimenter une charge (montage d’utilisation)
Et cette charge représentera elle même une certaine résistance complémentaire, ce qui fiche en l’air notre belle théorie du départ des 2 résistances égales.
Donc à moins de connaitre précisément cette résistance de charge et d’être sûr qu’elle reste fixe,ce montage risque de s’avérer pour le moins complexe à gérer
D’où le faite que généralement , on privilégie des solutions indépendantes de la charge.
L’on dispose pour ce faire, de deux possibilités :
- Les régulateurs linéaires
- Les régulateurs à découpage
Les régulateurs linéaires de tension
Principe
Ce sont des composants qui abaissent la tension d’entrée en utilisant l’effet joule.
La différence de potentiel est transformée en chaleur.
Familles des régulateurs
Il existe plusieurs familles de Régulateurs Intégrés de Tension (RIT).
- Les RIT à tension fixe positive
- Les RIT à tension fixe négative
- Les RIT à tension réglable
Exemple : les 78XX (7805,7809, 7812…) avec XX représentant la tension de sortie du régulateur
Exemple : les 79XX (7905,7909, 7912…)
Exemple : Les LM317
Cette famille de régulateurs possède la particularité de pouvoir choisir la tension de sortie en fonction du rapport de deux résistances.
En utilisant un potentiomètre, il est donc possible de faire varier la tension de sortie.
Contraintes
Il faut que la tension d’entrée du régulateur soit supérieur d’au moins 3V par rapport à la tension de sortie désirée.
Ainsi, si nous souhaitons alimenter un montage en 5V, il convient de posséder une alimentation d’au moins 8V.
cependant, les 3V de différence ne disparaissent pas par magie : ils sont dissipés sous forme de chaleur.
Le composant va donc « chauffer » ,mais dans certaines limites permettant de maintenir son intégrité de fonctionnement.
Il pourra donc évacuer un certain nombre de watts, que l’on peut éventuellement augmenter en élargissant la surface de contact du composant avec l’air ambiant ,d’où l’utilisation éventuelle de radiateurs (C’est le même principe que pour les processeurs des ordinateurs, qui ont un radiateur pour évacuer la chaleur, et même un ventilateur en complément).
On voit rapidement le corollaire de ce mode de fonctionnement
A partir du moment où votre tension source est fixée et la tension à obtenir imposée par l’utilisation , la différence de potentiel est donc imposée.
La puissance s’exprimant par :
Avec
- Pdisspiée la puissance dissipée par le régulateur en Watt
- U entrée : la tension d’entrée du régulateur en Volt
- U sortie : la tension de sortie du régulateur en Volt
- I charge : le courant consommé par le circuit en aval du régulateur en Ampère
On se rend vite compte que l’ampérage obtenu grâce à ce type de composant sera limité car la puissance dissipée est proportionnelle au courant de la charge.
Au mieux, on pourrait obtenir quelques centaines de mA
Ce composant est adapté pour alimenter en direct des capteurs peu gourmands , une diode mais il est fortement déconseillé pour les montages gourmand en courant (moteurs, servomoteurs…).
Les alimentations à découpage
Principe
Pour faire simple, on applique sur la sortie la tension d’entrée pendant une fraction du temps seulement .
On obtient donc une tension de sortie moyenne, inférieure à la tension d’entrée et proportionnelle au temps où on « laisse passer » la tension initiale.
Il n’y a donc pas (ou relativement peu) d’échauffement ,contrairement aux régulateurs linéaires, donc pas de radiateurs encombrants …
Familles des alimentations à découpage
- Un convertisseur Buck, ou hacheur série, est une alimentation à découpage qui convertit une tension continue en une autre tension continue de plus faible valeur.
- Un convertisseur Boost , ou hacheur parallèle, est une alimentation à découpage qui convertit une tension continue en une autre tension continue de plus forte valeur.
- Un convertisseur Buck-Boost est une alimentation à découpage qui convertit une tension continue en une autre tension continue de plus faible ou plus grande valeur mais de polarité inverse.
- Un convertisseur Flyback est une alimentation à découpage, généralement avec une isolation galvanique entre l’entrée et la sortie (très utilisé dans l’industrie)
Pour l’utilisation en robotique, nous serons plutôt dans un cadre « Buck » (éventuellement flyback)
Soit l’alimentation est à tension de sortie prédéfinie (ex 5V), soit l’alimentation est ajustable : la plage de tension de sortie est large (ex : 1 à 12V pour entrée 2 à 30V)
Inconvénients
Le hachage est générateur de parasites ,ce qui peut être gênant pour certaines utilisations.
Avantages
Ce type d’alimentation a un rendement souvent aux alentours de 90% .On perd donc beaucoup moins d’énergie qu’avec un régulateur linéaire qui évacue une bonne part de l’énergie d’origine en chaleur.
Ceci tend à me faire dire que si les régulateurs linéaires sont adaptés pour de faibles ampérages (Ce n’est pas trop pénalisant d’utiliser 200 mA pour en produire 100 par ex ), Les alimentations à découpage se justifient pleinement pour des utilisations plus gourmandes.
Si l’élément de base est donné pour une sortie maxi de 1A en général, il est assez aisé de trouver des alimentations à découpage ,mises en oeuvre dans des montages de puissance très compacts ,à 10 – 15A … et à des prix intéressants.
Exemple : Datasheet d’alimentation Murata : alimentation_murata