221210: atelier3, programme kit solaire
Suite aux 1ers essais de notre maquette kit de suivi solaire,
J’ai préféré modifier le câblage pour simplifier la programmation.
On verra cette modif au prochain atelier du 10/12/2022.
Cependant, pour ceux qui m’ont demandé les infos en avance, voici ci-joint:
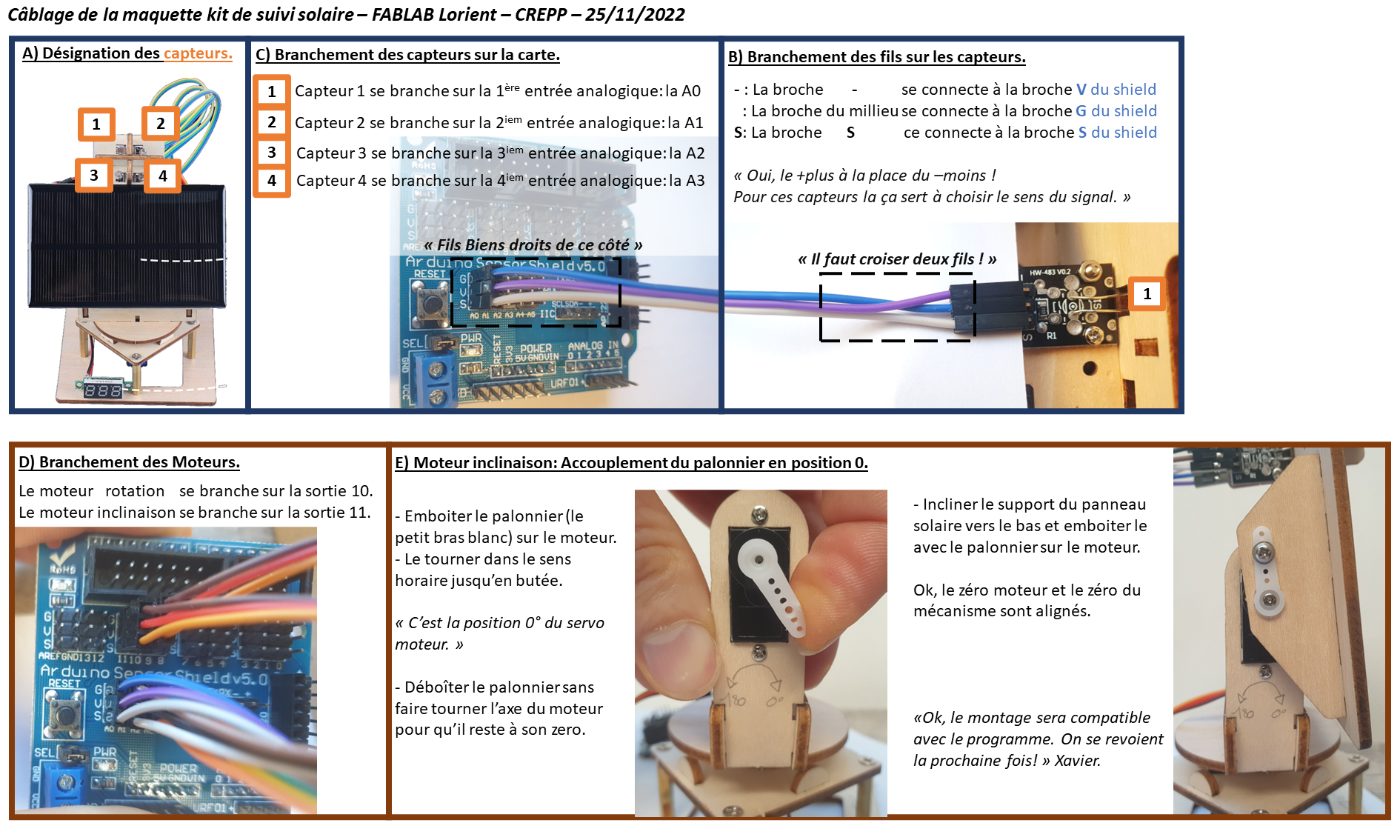
– Les instructions de câblage et l’alignement du moteur inclinaison,
– La page du catalogue où a été acheté le kit.

– Le programme (à décompresser): vous pouvez le téléverser dans la carte,
code:
/*
Traceur solaire 4 capteurs de lumière.
Le programme:
- lit les 4 capteurs de lumière,
- Les interpretes pour décider vers où s'orienter,
- et fait tourner les 2 servos moteurs pour s'aligner vers la lumière.
Créé le 1 Sep 2022, par Xavier Lesot, basé sur : https://www.instructables.com/DIY-Miniature-Solar-Tracker/
Modifié le 4 Nov 2022, par Xavier Lesot : Ajout des commentaires.
Modifié le 18 Nov 2022, par Xavier Lesot : Améliorations après 1ers retours d'expériences.
*/
// --------------------------------------------
// Câblage des broches
// Connecte la broche physique avec sa référence dans le programme.
// --------------------------------------------
// Entrées
int brocheHG = A0;
int brocheHD = A1;
int brocheBG = A2;
int brocheBD = A3;
int brocheJoyX = A4;
int brocheJoyY = A5;
// Sorties
int brocheServoRotation = 10;
int brocheServoInclinaison = 11;
int brocheLed = 13;
// --------------------------------------------
// Créer des Variables
// Définit des cases dans la mémoire RAM pour y stocker des valeurs.
// int = 16 bits = -32,768 to 32,767
// --------------------------------------------
int HG; // stockera la valeur du capteur Haut Gauche
int HD; // stockera la valeur du capteur Droite
int BG; // stockera la valeur du capteur Bas Gauche
int BD; // stockera la valeur du capteur Bas droite
int JoyX; // Option contrôle par joystick
int JoyY;
// Réglages paramétrable:
int frequenceActualisation = 25; // Réglage de la vitesse
int consigneRotation = 90; // Position initiale (au démarrage) 90° = millieu.
int consigneInclinaison = 10; // Position initiale (au démarrage) 90° = millieu.
bool modeJoystick = false; // false: Mode capteur, true: mode joystick (optionnel).
// limites logiciels
// Butées logiciels pour empêcher le mecanisme d'aller là ou il coince.
// Ces réglages doivent être adjustés lorsque c'est mécaniquement impossible d'atteindre toute la plage de rotation du servomoteur.
int LimiteRotationMax = 180;
int LimiteRotationMin = 0;
int LimiteInclinaisonMax = 100;
int LimiteInclinaisonMin = 10;
// --------------------------------------------
// Servo
// --------------------------------------------
// créer un objet servo pour contrôler un servo.
// douze objets servo peuvent être créés sur la plupart des cartes.
#include <Servo.h> // La biblotèque d'instructions qui s'occupe de fabriquer le signal electrique pour piloter le servo.
Servo servoRotation; // crée un objet servo pour contrôler un servo.
Servo servoInclinaison; // crée un objet servo pour contrôler un servo
// ============================================
// Setup
// ============================================
void setup() { // mettez votre code d'installation ici, à exécuter une fois.
// Servo
servoRotation.attach(brocheServoRotation); // attache le servomoteur à l'objet servoRotation par la broche 10.
servoInclinaison.attach(brocheServoInclinaison); // attache le servomoteur à l'objet servoInclinaison par la broche 11.
// broche à configurer en sortie
pinMode(brocheLed, OUTPUT); // dit à l'arduino que la broche est utilisée en sortie (car aussi possible de l'utiliser en entrée).
// Liaison Série
// Démarre la communication sur la liaison série à la vitesse 9600 bauds
// (bauds: bit per second: bps. Représente le nombre de bits (0 ou 1) transmis en une seconde.)
// (9600 bauds: +-1ko/s. Durée d'un bit: 1.042 ms.)
Serial.begin(115200); // Démarre la liaison série
Serial.println("Hello World !"); // « Hello world » sont les mots traditionnellement écrits par un programme informatique simple dont le but est de faire la démonstration rapide de son exécution sans erreur.
}
// ============================================
// Loop
// ============================================
void loop() { //mettez votre code principal ici, à exécuter à plusieurs reprises.
// --------------------------------------------
// Lecture des entrées analogiques.
// --------------------------------------------
// Lectures des valeurs des photoresistances
HG = analogRead(brocheHG); // lit l'entrée A0 et stock le résultat dans HG
HD = analogRead(brocheHD);
BG = analogRead(brocheBG);
BD = analogRead(brocheBD);
// Si besoin d'inverser le signal
// HG = map(HG, 0, 1023, 1023, 0);
// HD = map(HD, 0, 1023, 1023, 0);
// BG = map(BG, 0, 1023, 1023, 0);
// BD = map(BD, 0, 1023, 1023, 0);
if (modeJoystick){ // si mode Joystick alors:
JoyX = analogRead(A4); // lit aussi les joysticks
JoyY = analogRead(A5);
}
// A propos des photorésistances:
// https://fr.wikipedia.org/wiki/Photor%C3%A9sistance
// Exposé à la lumière affiche grands chiffres car représente beaucoup d'électricitée à pouvoir la traverser.
// Caché de la lumière affiche petits chiffres car représente peu d'électricitée à pouvoir la traverser.
// Affichage des résultats sur le moniteur série:
// (L'arduino envoi sur la liaison série, l'ordinateur reçoit et affiche sur le moniteur série).
Serial.println(); // Commence sur une nouvelle ligne. (println: "Print Line New" fait Retour chariot et saut à la ligne)
Serial.print("HG: "); // envoi un texte qui décrit ce qui va suivre
Serial.print(HG); // envoi la valeur du capteur HautGauche
Serial.print(", "); // envoi virgule et espace pour la mise en forme pour que ce soit mieux lisible dans le moniteur serie
Serial.print("HD: ");
Serial.print(HD);
Serial.print(", ");
Serial.print("BG: ");
Serial.print(BG);
Serial.print(", ");
Serial.print("BD: ");
Serial.print(BD);
Serial.print(", ");
if (modeJoystick){
Serial.print("JoyX: "); Serial.print(JoyX); Serial.print(", ");
Serial.print("JoyY: "); Serial.print(JoyY); Serial.print(", ");
}
// --------------------------------------------
// Interprétation des capteurs:
// Selon la provenance de la lumière,
// change la consigne à l'axe du servomoteur d' 1° dans un sens ou dans l'autre.
// --------------------------------------------
Serial.print("| "); // mise en forme
// Rotation
if (HG > HD) { // Si +plus de lumière à Gauche
consigneRotation -= 1; // incrémente 1° de rotation dans le sens horaire pour aller vers elle.
Serial.print("R- "); // Affiche le résultat de l'interprétation: "Rotation -1°"
}
if (BG > BD) { // Si +plus de lumière à Gauche
consigneRotation -= 1; // incrémente 1° de rotation horaire
Serial.print("R- ");
}
if (HG < HD) { // Si +plus de lumière à Droite
consigneRotation += 1; // incrémente 1° de rotation anti-horaire
Serial.print("R+ ");
}
if (BG < BD) { // Si +plus de lumière à Droite consigneRotation += 1; // incrémente 1° de rotation anti-horaire Serial.print("R+ "); } // inclinaison if (HG > BG){ // Si +plus de lumière en Haut
consigneInclinaison += 1; // incrémente incline 1° vers le Haut
Serial.print("I+ ");
}
if (HD > BD){ // Si +plus de lumière en Haut
consigneInclinaison += 1; // incrémente incline 1° vers le Haut
Serial.print("I+ ");
}
if (HG < BG){ // Si +plus de lumière en Bas
consigneInclinaison -= 1; // incrémente incline 1° vers le Bas
Serial.print("I- ");
}
if (HD < BD){ // Si +plus de lumière en Bas
consigneInclinaison -= 1; // incrémente incline 1° vers le Bas
Serial.print("I- ");
}
Serial.print("| "); // mise en forme
// --------------------------------------------
// interprétation des capteurs terminé
// --------------------------------------------
// --------------------------------------------
// Fin de course logiciel.
// Limite les consignes minimums et maximums
// la limite max des servomoteur c'est 0...180°
// (modification des réglages des limites tout en haut du programme.)
// --------------------------------------------
// Rotation Minimum
if (consigneRotation < LimiteRotationMin) { // Si (Consigne plusPetiteQue minimum) alors consigneRotation = LimiteRotationMin; // réhausse la consigne à la limite. } // Rotation Maximum if (consigneRotation > LimiteRotationMax) {// Si (Consigne plusGrandeQue maximum) alors
consigneRotation = LimiteRotationMax; // redescend la consigne à la limite.
}
// Inclinaison Minimum
if (consigneInclinaison < LimiteInclinaisonMin){ // Inclinaison Maximum
consigneInclinaison = LimiteInclinaisonMax;
}
// --------------------------------------------
// Joystick
// Si bouton mode joystick alors branche les joysticks directement sur les consignes aux moteurs et ignore les résultats précents.
// --------------------------------------------
if (modeJoystick){
consigneRotation = map(JoyX, 0, 1023, 0, 180);
consigneInclinaison = map(JoyY, 0, 1023, 0, 180);
}
// --------------------------------------------
// Ecriture de la consigne vers les moteurs
// --------------------------------------------
// Affichage les consignes sur le moniteur série
Serial.print("Rotation: ");
Serial.print(consigneRotation);
Serial.print(", ");
Serial.print("Inclinaison: ");
Serial.print(consigneInclinaison);
Serial.print(", ");
servoRotation.write(consigneRotation); // envoi la consigne vers le moteur
servoInclinaison.write(consigneInclinaison); // envoi la consigne vers le moteur
// fait clignoter la led à chaque actualisation
if (digitalRead(brocheLed) == LOW){
digitalWrite(brocheLed, HIGH);
}else{
digitalWrite(brocheLed, LOW);
}
// --------------------------------------------
// Fréquence d'actualisation.
// C'est le temps avant de relire la boucle,
// C'est donc le Temps avant de refaire tourner d'1° les moteurs,
// C'est donc la vitesse du traceur solaire.
// --------------------------------------------
delay(frequenceActualisation); // en millisecondes
} // Fin.