Site du Club de Robotique et d'Electronique Programmable de Ploemeur.
Arduino 2019-4: Mooc FUN TP4 Feu barrière
TP4: Feu tricolore avec barrière
/*
Feu bicolore et barrière
TP de la semaine 5 du MOOC "La Fabrication Numerique"
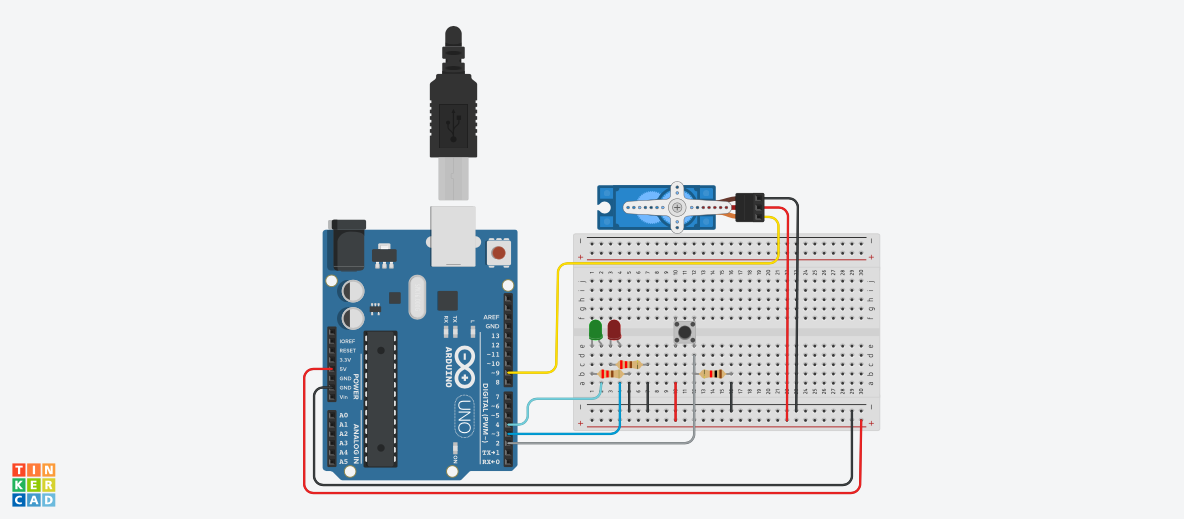
Le montage :
* Une LED rouge sur la broche 3 en serie avec une resistance de 220Ω
* Une LED verte sur la broche 4 en serie avec une resistance de 220Ω
* Un servomoteur branché sur les broches 9, +5V et GND
* Bouton poussoir branché sur la broche 2 depuis +5V
* Une résistance de 1KΩ bracnhé sur la broche 2 depuis GND
*/
#include <Servo.h>
Servo servo; // création de l'objet servo
// 3 constantes
const int bouton = 2;
const int ledRouge = 3;
const int ledVerte = 4;
// 2 variables :
int etatBouton = 0;
int pos = 0;
// exécution 1x au début
void setup() {
// pour communiquer avec l'ordinateur
Serial.begin(9600);
// les broches des LED en sortie
pinMode(ledRouge, OUTPUT);
pinMode(ledVerte, OUTPUT);
// la broche bouton en entrée :
pinMode(bouton, INPUT);
// le servomoteur sur la broche 9
servo.attach(9);
// allume le feu rouge
digitalWrite(ledRouge, HIGH);
// barrière horizontal 0 ; verticale 90
servo.write(0);
}
// boucle infinie
void loop(){
// lire la caleur du bouton:
etatBouton = digitalRead(bouton);
// si le bouton est appuyé
if (etatBouton == HIGH) {
// alors message sur le moniteur série
Serial.print("Bouton appuye");
// et barrière à 90°
for(pos = 0; pos <= 90; pos++) {
servo.write(pos);
delay(15);
}
// puis feu vert pendant 5 secondes
digitalWrite(ledRouge, LOW);
digitalWrite(ledVerte, HIGH);
delay(5000);
// et de nouveau le rouge
digitalWrite(ledVerte, LOW);
digitalWrite(ledRouge, HIGH);
// enfin, barrière descend de 90° à 0°
for(pos = 90; pos>=0; pos--) {
servo.write(pos);
delay(15);
}
}
}